参与了世界上蕞知名的越野赛事活动,达喀尔拉力赛,之后创造了12冠的辉煌战绩,其中7连冠的伟业更是前无古人的记录。多年的达喀尔磨练,让三菱深知车辆“野外作战”所需的一切功能,因此超选四驱系统孕育而生。
欧蓝德,则是搭载了S-AWC超级全轮控制系统,这套系统是基于三菱EVO的四驱系统开发而来,当然了,这也与它的定位有关,因为欧蓝德是一款城市型SUV,更偏向公路表现。
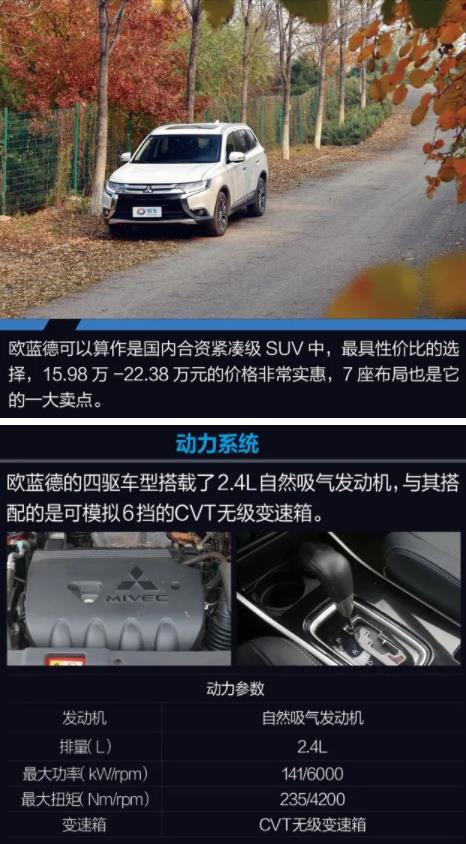
这里需要说明的是,欧蓝德2.4L配有S-AWC四驱系统,其余车型采用的是4WD四驱系统。这两种四驱系统,都带有多片离合式限滑中央差速器,都可按需分配前/后桥的动力配比。
不同的是,S-AWC四驱系统把4WD四驱系统前桥的开放式差速器升级为了主动式前差速器(AFD)。该主动式前差速器可以通过多片式离合器进行锁止,从而实现前轮间50:50的动力配比。

相比AWC,S-AWC系统在电子化程度和对各个部分的整合程度上有了不小的提高,它可以快速收集转向角速度、节气门开度、车轮转速、纵向加速度和横向加速度等参数,对车轮的扭矩和制动力进行控制,改善车辆在行使过程中的车身姿态,保证其牵引力、稳定性和弯道性能。

S-AWC是在电控多片离合器式中央差速器为核心的四轮驱动(4WD)基础上,将EPS、AFD制动等电控系统进行整合集成的控制系统。此外,S-AWC还拥有AYC主动侧滑控制系统和AFD主动前差速器。
团队的力量是可怕的,这几种系统单独工作貌似并不起眼,但整合到一起后就赋予了欧蓝德很大的优势:AYC和AFD能够根据行驶姿态等相关信息,实时调整对车轮的动力分配,以及根据情况对车轮施加制动力,精确控制车辆在各种路况下的动态行驶效果,能够有效提高各种级限状态下的行驶稳定性。
绕桩体验:

AYC主动偏向控制系统,被设计在欧蓝德的后轴上,主要作用是负责在两个后轮之间分配扭力,过弯时系统会将扭力更多分配给弯道外侧的后轮,这不是传统意义上开放差速器概念,因为AYC在前后扭矩分配50:50的前提下,能主动为弯道外侧轮增加10%的扭矩,这是传统开放式差速器做不到的。
当我们锁定四驱状态时,欧蓝德在绕桩体验中的表现要明显好于普通模式,车速可以更快,车身稳定性也会更好,驾驶它时,能给我更强的信心。

越野体验:
在越野实地测试中,我们首先测试了欧蓝德的爬坡能力,在坡度较大的路段下,欧蓝德以两驱形式爬坡,前轮会出现轻微的打滑现象,当切换至四驱模式后,爬坡就变得非常轻松了。在下坡路段中,由于欧蓝德并未配备陡坡缓降功能,所以只能自己掌握刹车,没有这方面的电子设备可以依赖。

欧蓝德的蕞小离地间隙190mm,接近角22°,离去角21°,凭借着不错的数据,即便是在起伏很大的越野路段,也不容易托底,当四驱系统在前轮打滑时,能够在较短的时间内快速响应,实现前后轮50:50的扭矩分配,提升车辆的脱困能力。
欧蓝德炮弹坑体验
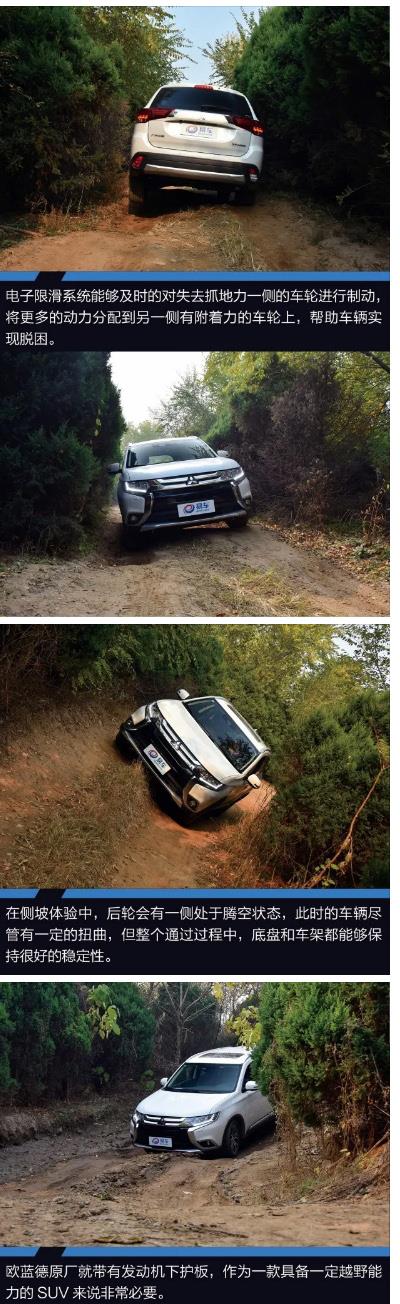
作为一款城市型SUV而言,配备四驱系统更多的是为了增加湿滑道路下的稳定性和一般冰雪路面的脱困能力。此次我们简单的体验了欧蓝德的这套S-AWC四驱系统,在经过炮弹坑这种模拟交叉轴情形的路况时,电子限滑系统介入比较及时,对于失去抓地力的车轮制动效果比较明显,能够比较顺利的通过。可以说欧蓝德对于简单的非铺装路面来说具备不错的通过能力,但重度越野并非它的强项。对于三菱来说,SS4(超选四驱系统)才是越野的终极利器。







 鲁公网安备37010402001234号
鲁公网安备37010402001234号